Technical director at ARCADIS and UK Operational Traffic Modelling Community of Practice, David Carrignon and his team have joined their forces with Aimsun and GoodVision to publish their paper at the European Transport Conference 2021. We are summing up to you the steps they took in the research and its major outcomes. If you want to go deeper in the topic, you can find the full version of the Paper here.
.png?width=550&height=214&name=Group%20569-2%20(1).png)
THE PROBLEM
Nowadays, we see globally that bicycles and e-scooters are more and more present on road networks. Adequate infrastructure must be developed, and traffic modelling tools must be adapted to design and assess cycle infrastructure for two-wheelers. At the moment, when calculating saturation flows, the specific characteristics of bicycles and e-scooters are ignored, preventing modellers from assessing the suitability of the design for active travel. What is more, Connected and Autonomous Vehicles (CAVs) have emerging certification processes that will rely on traffic simulation. All this inevitably brings the need for further development in the field.

THE CHALLENGE
To respond to the above requirements, an upgrade of the saturation flow survey method has been proposed by David’s research team. This method should enable the measurements of traffic flow characteristics in heterogeneous traffic conditions, taking into consideration ‘’narrow vehicles’’ (bicycles and e-scooters).
Bi-Cycle Unit (BCU) versus Passenger-Car Unit (PCU)
The authors wanted to remain consistent with existing calculation methods, to enable the transfer of information between various modelling scales and characterise traffic conditions for cyclists and e-scooters. Bi-Cycle Unit (BCU) was introduced as a new vehicle unit. It is equivalent to the PCU metric, with the addition of a speed parameter. The idea behind this was to consider the impact of speed differences.
| Vehicle Type | PCU Value(length-based) |
| Motor Cycle | 0.4 |
| Passenger Car | 1.0 |
| Light Goods Vehicles (LGV) | 1.0 |
| Medium Goods Vehicles (MGV) | 1.5 |
| Buses and Coaches | 2.0 |
| Heavy Goods Vehicles | 2.3 |
| Vehicle Type |
BCU Value* (footprint based) |
| Pedal Cycle | 0.2 |
| Kick Scooters and E-Scooters | 0.1 |
*includes a speed adjustment parameter
As you well know, traffic saturation flow is the maximum flow rate that can go through a road segment if only geometric limitations are taken into account. This value is a critical parameter in the calculation of road capacity. In the late 2000s, bicycle traffic became more and more prevalent on London (UK) roads and, in order to consider these new traffic conditions, in 2009 authors decided to measure the impact of two-wheelers as if they were an environmental constraint to car capacity. However, they soon realized one major drawback of this method. The fact that it introduces a variable element to the saturation flow calculation in order to account for two-wheelers on the road.
It was clear to the research team that such methodology needed to be reconsidered, mainly because of 3 major changes taking place:
- New AI methods enable the automated processing of video surveys with a much higher degree of accuracy nowadays. Such methods can process considerably larger video samples with consistent data collection and vehicle type classification.
- e-scooters are on trial on UK streets and although they have been recently banned by TfL on the public transport network due to safety reasons, they are expected to be regulated and become street legal in the near future. This new mode of transport will create an increased demand for bicycle facilities and the updated future regulation is expected to require them to use the road and not ride on pavements.
- Microsimulation tools are being used to provide background traffic for the simulation and possible certification of CAVs. It is therefore important to improve methods of analysing the interactions between two-wheelers with traditional traffic and the impact they have on flow.
New method of calculation and lessons learned
The authors thus realized that a new calculation method would be required to prepare the upgrade of the road network in cities across the UK. Here are some of the key lessons their learned from the past 10 years:
- Low power two-wheelers such as kick-scooters, bicycles, and e-scooters tend to do short-distance trips and the zoning system of strategic models is too rough to represent these trips accurately. A metric is needed that would ensure consistency between strategic models and local junction models.
- The concept design process outcome is heavily impacted by the order in which road user types are considered. A typical design process starts with assessing the capacity requirement for general traffic, then focuses on equipment for buses, and finally details equipment for cyclists and pedestrians. Because design decisions are being made as projects progress, cyclists and pedestrians’ equipment had to fit around the car and buses requirements. The UK Traffic Signs Manual has now formally acknowledged this and reversed the order in which user classes should be considered in urban areas.
- Traffic modelling tools must therefore be adapted to enable the analysis of traffic conditions in the required order; and Saturation flow, as a measure of traffic throughput, is independent of variations of traffic composition over time. This critical characteristic is no longer true in the method currently in use for accounting for two-wheelers, and it is particularly problematic when considering future traffic scenarios.
NEW TRAFFIC SURVEY METHODS AVAILABLE
The current saturation flow measurement methodology in use in the UK originates from the work done by the Road Research Laboratory. As stated in their paper and based on practical experience, the measurement can have relatively low levels of accuracy. However, as this type of measurement is critical only for saturated networks with non-standard geometries, accuracy is absolutely crucial. Not only in the UK, but also in any typical European city centre, there are a lot of external environmental factors that can affect the capacity of the road (road surfacing, visibility, curbside activity, lane selection behaviour…). On-site measurement is the only way of capturing them all.
Two-wheelers in large volumes on the network will impact traffic conditions, and the measurement of saturation flow is a good solution. However, to compensate for the large range of possible situations, the number of observations must be significantly increased. And this in turn makes saturation flow calculation impractical by manual operators. The measurement must be therefore automated.
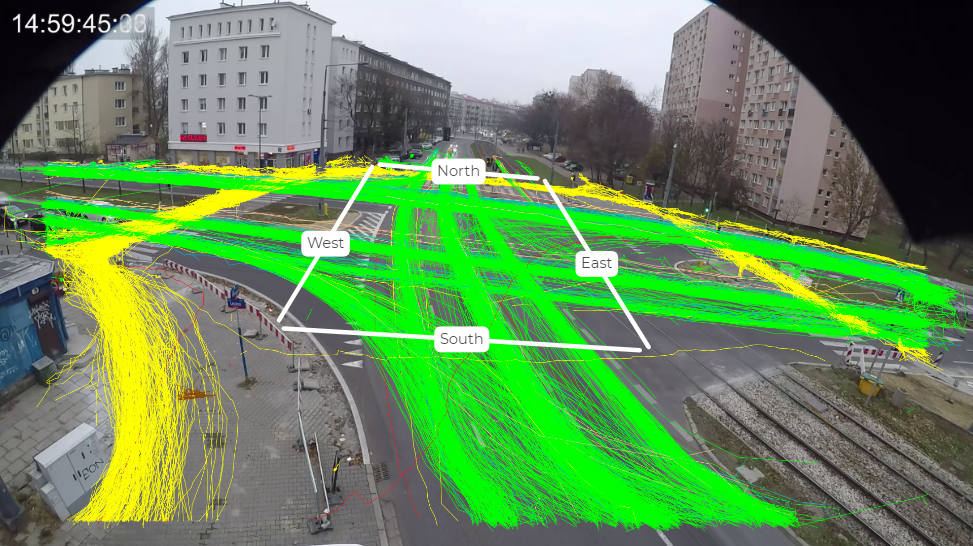
In this respect, the research team contacted several traffic analytics companies. They found out that GoodVision could satisfy their needs, being vehicle traces extraction a standard process for them. It was possible for them to visually observe, pull out and work with the exact position of each vehicle in each lane. On top of that, e-scooters could be added as a custom vehicle class in a solution called Video Insights. Authors realized that the solution offered speed and acceleration measurement by using scene georeferencing. The accuracy of acceleration data could reach up to 90%. Moreover, very advanced GoodVision’s AI technology-enabled capturing a whole intersection or a larger roundabout by one only camera or a drone.
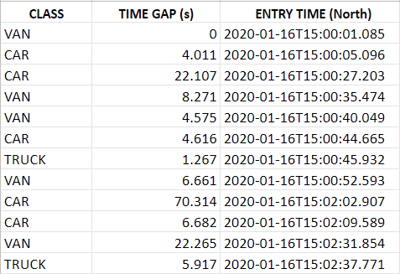
So not only did GoodVision Ltd. have an existing tool for measuring saturation flow. The research team realized that Video Insights could process the measurement in the exact way to the original calculation method defined by TfL guidelines. Which is what they were looking for in the first place. What is more, it provided headway measurements with the attached vehicle type identification.
You can see the vehicle and pedestrian trajectory records shown in the figure below. David’s team was glad to find out that measurement was possible, even at a challenging angle from a distance.
MAIN TAKEAWAYS
As we could see from the research, an upgrade of traffic modelling tools is required due to UK design manuals and the approaching inclusion of e-scooters on the road network. At the same time, a similar requirement exists in CAVs simulators to create realistic vehicle interactions between CAVs and narrow vehicles in microsimulation models. These simulators, such as Aimsun Next, are being used to create realistic background traffic conditions in the simulation.
Aimsun Next already contains a method for outputting saturation flows using vehicle headway output files. This method was further developed using Aimsun Next’s API to allow the vehicle’s type to be output in addition to the vehicle headway. This allows the user to separately monitor the PCU and BCU in a model.
As the authors state, the next research stage would require the identification of suitable sites to collect BCU saturation data and calibrate the fitting on parameters.
. . .
This research was undertaken as part of the OmniCAV project, part-funded by the Centre for Connected and Autonomous Vehicles and is part of the preparation of a background traffic model for the Aimsun Next CAVs simulator.
